Truck 4 Channel DVR Security Camera System Kit
Truck 4 Channel DVR Security Camera System
Installing an 4-channel DVR truck security camera system may seem like a complex task, but it can be quickly and easily accomplished with the right tools and instructions.

1. Selecting the Right Position:
The location should be safe, easily accessible, and free from moisture and dust.
2. Installing the Cameras:
Place the cameras strategically to provide maximum coverage.
Ensure the cameras are securely installed and the cables are properly connected.
3. Laying the Cables:
Lay the cables for the DVR.
4. Connecting to the DVR:
Connect each camera to the correct input on the DVR.
5. Starting the System:
Connect the power cable to the DVR and plug it in.
6. Configuring the System:
Set up recording settings, motion detection settings, and other system parameters.
7. Testing the System:
Check each camera to ensure they are recording and the images are clear.




hnweb_
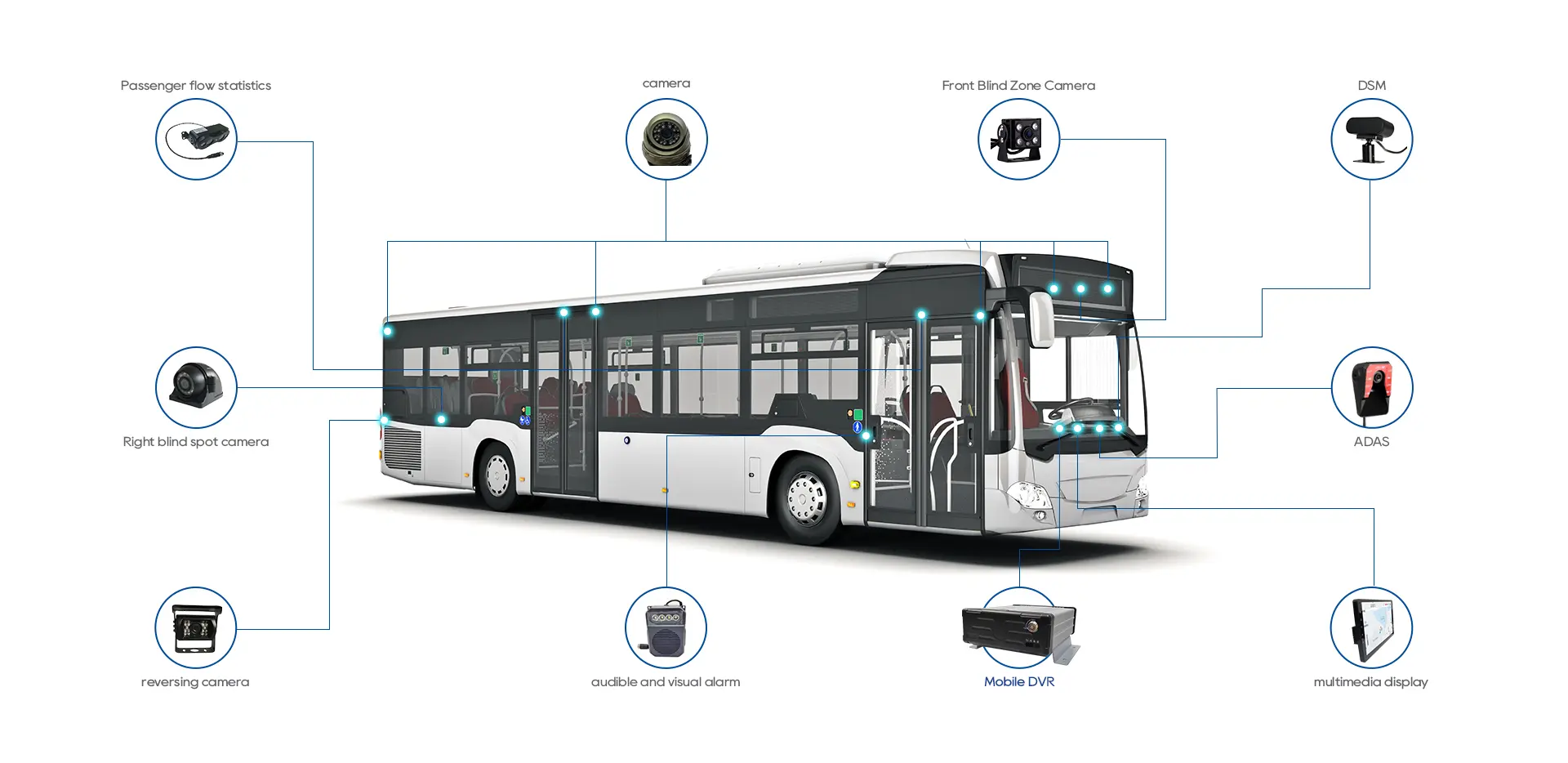
360-Degree Surround View Monitoring
The 4-channel mobile hard disk recorder supports 3G and 4G and is compatible with wide-angle cameras, enabling true 360-degree panoramic monitoring without blind spots. The system supports automatic calibration, saving installation time and costs. With BSD algorithms, the intelligent MDVR can detect pedestrians in real-time in front, side, and rear of the vehicle, avoiding accidents caused by blind spots. Suitable for trucks, buses, construction machinery, and other large vehicles. Through the PC CMS client, you can clearly view the current location and historical driving trajectory of vehicles on operating system maps/Google Maps/Baidu Maps.

720P HD 4G WIFI GPS Android iOS APP Bus DVR 4-Channel DVR Truck Security Camera System
Truck 4 Channel DVR Features
- 7-inch/9-inch TFT LCD monitor
- AHD 720P/1080PP wide-angle cameras
- IP67/IP68/IP69K waterproof rating
- 4-channel 4G/WIFI/GPS loop recording
- Supports Windows, iOS, and Android platforms
- Supports 2.5-inch 2TB HDD/SSD
- Supports 256GB SD card
- Wide voltage range DC9-36V
- Extension cables available in 3m/5m/10m/15m/20m lengths
Email:hello@yuweitek.com